Reach-Avoid¶
Synthesize a controller that reaches a target region while avoiding unsafe regions. IMPaCT automatically detects reach-avoid when both target and avoid regions are defined.
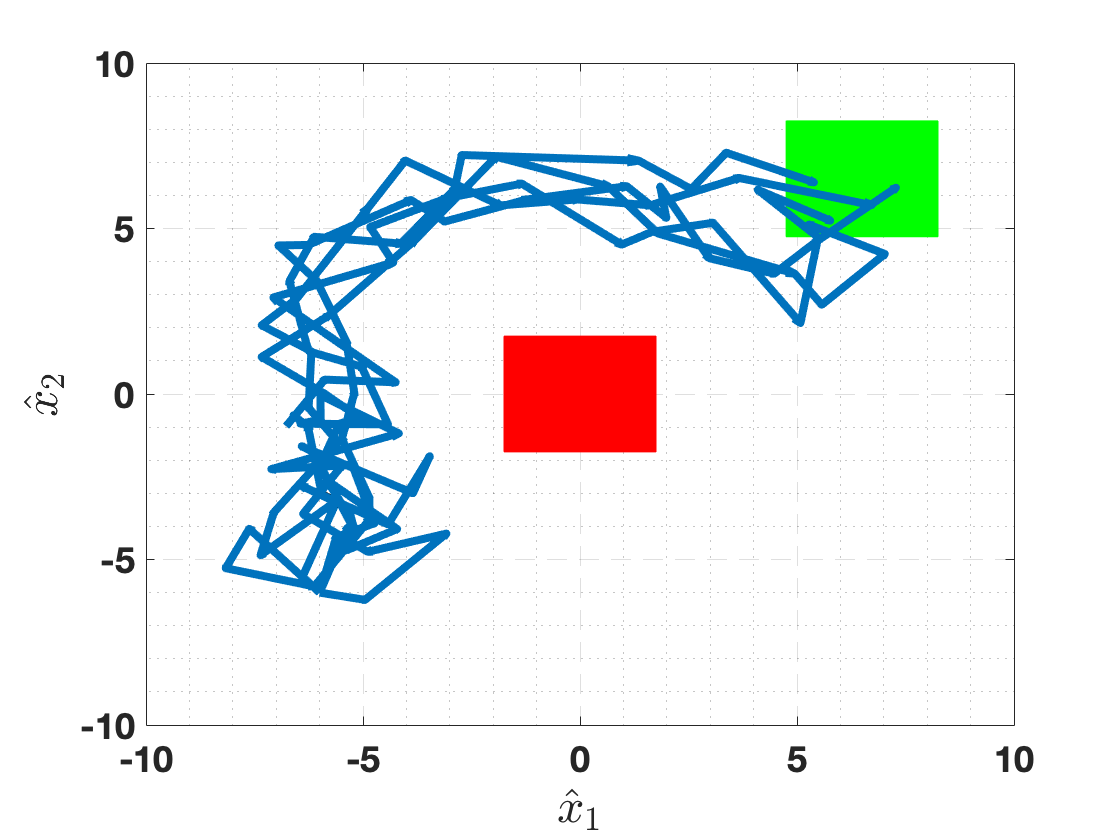
2D Robot Reach-Avoid — Undisturbed (ex_2Drobot-RA-U)¶
System:
Dimensions: 2D state, 2D input
Target: Green region
Avoid: Red region
Specification: Infinite-horizon reach-while-avoid
The configuration uses setTargetAvoidSpace() to define both regions simultaneously.
Run:
cd examples/ex_2Drobot-RA-U
make && ./robot2D
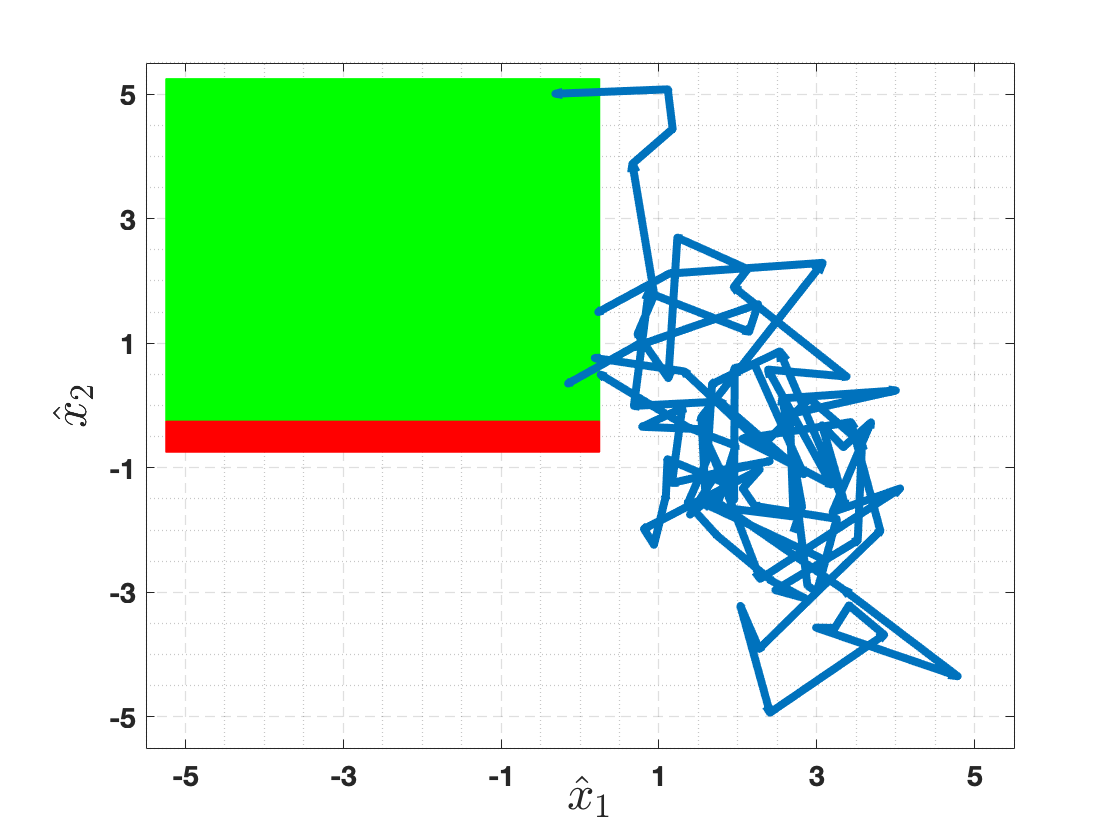
2D Robot Reach-Avoid — Disturbed (ex_2Drobot-RA-D)¶
Same reach-avoid problem with additive disturbance.
Run:
cd examples/ex_2Drobot-RA-D
make && ./robot2D
3D Autonomous Vehicle (ex_3Dvehicle-RA)¶
A 3D autonomous vehicle controller navigates to a target region while avoiding obstacles. This is a larger example that demonstrates scaling to higher dimensions.
System:
Dimensions: 3D state, 2D input
Specification: Infinite-horizon reach-while-avoid
Run:
cd examples/ex_3Dvehicle-RA
make && ./vehicle3D