Reachability¶
Synthesize a controller that drives the system to a target region.
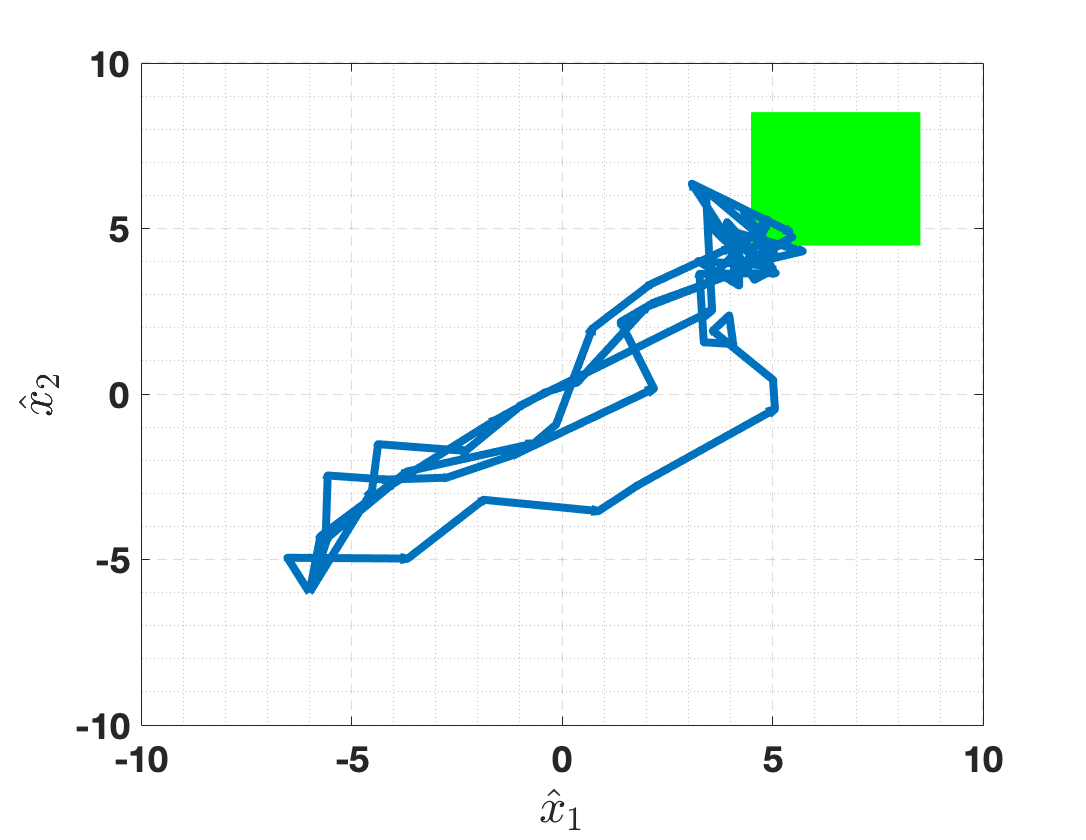
2D Robot — Undisturbed (ex_2Drobot-R-U)¶
A 2D mobile robot navigates to a target region using synthesized control inputs.
System:
Dimensions: 2D state (position), 2D input (speed, angle)
State space: \([-10, 10]^2\), step size 1
Input space: \([-1, 1]^2\), step size 0.2
Dynamics: \(x_{k+1} = x_k + 2u_0 \cos(u_1),\; y_{k+1} = y_k + 2u_0 \sin(u_1)\)
Noise: Diagonal Gaussian, \(\sigma = \sqrt{1/1.333}\)
Target: Square region \([5, 8]^2\)
Specification: Infinite-horizon reachability (pessimistic)
Run:
cd examples/ex_2Drobot-R-U
make && ./robot2D
This is the simplest example and serves as the basis for the Quick Start.
2D Robot — Disturbed (ex_2Drobot-R-D)¶
Same system with an additive disturbance input. This is the most thoroughly commented example and is recommended for understanding the configuration file format.
Additional features:
2D disturbance space
Three-parameter dynamics:
function<vec(const vec&, const vec&, const vec&)>Demonstrates both infinite and finite horizon (finite is commented out)
Run:
cd examples/ex_2Drobot-R-D
make && ./robot2D