Safety¶
Synthesize a controller (or verify) that the system remains within a safe region. In safety specifications, the entire state space is the safe region by default.
3D Room Temperature (ex_3Droom-S)¶
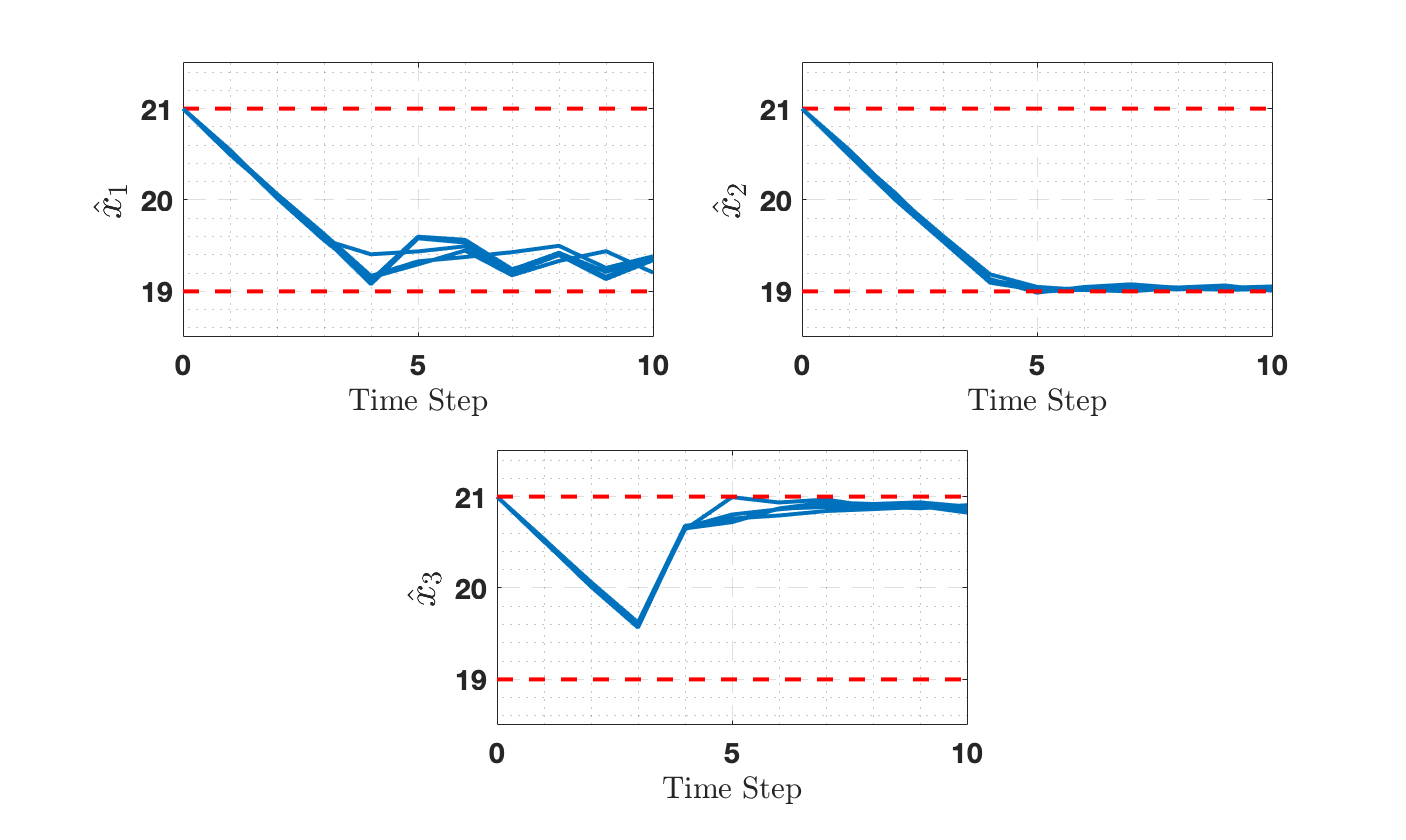
A 3D room temperature model is controlled to stay within safe temperature bounds (shown by red dashes) over a finite time horizon of 10 steps.
Run:
cd examples/ex_3Droom-S
make && ./room3D
4D Building Automation (ex_4DBAS-S)¶
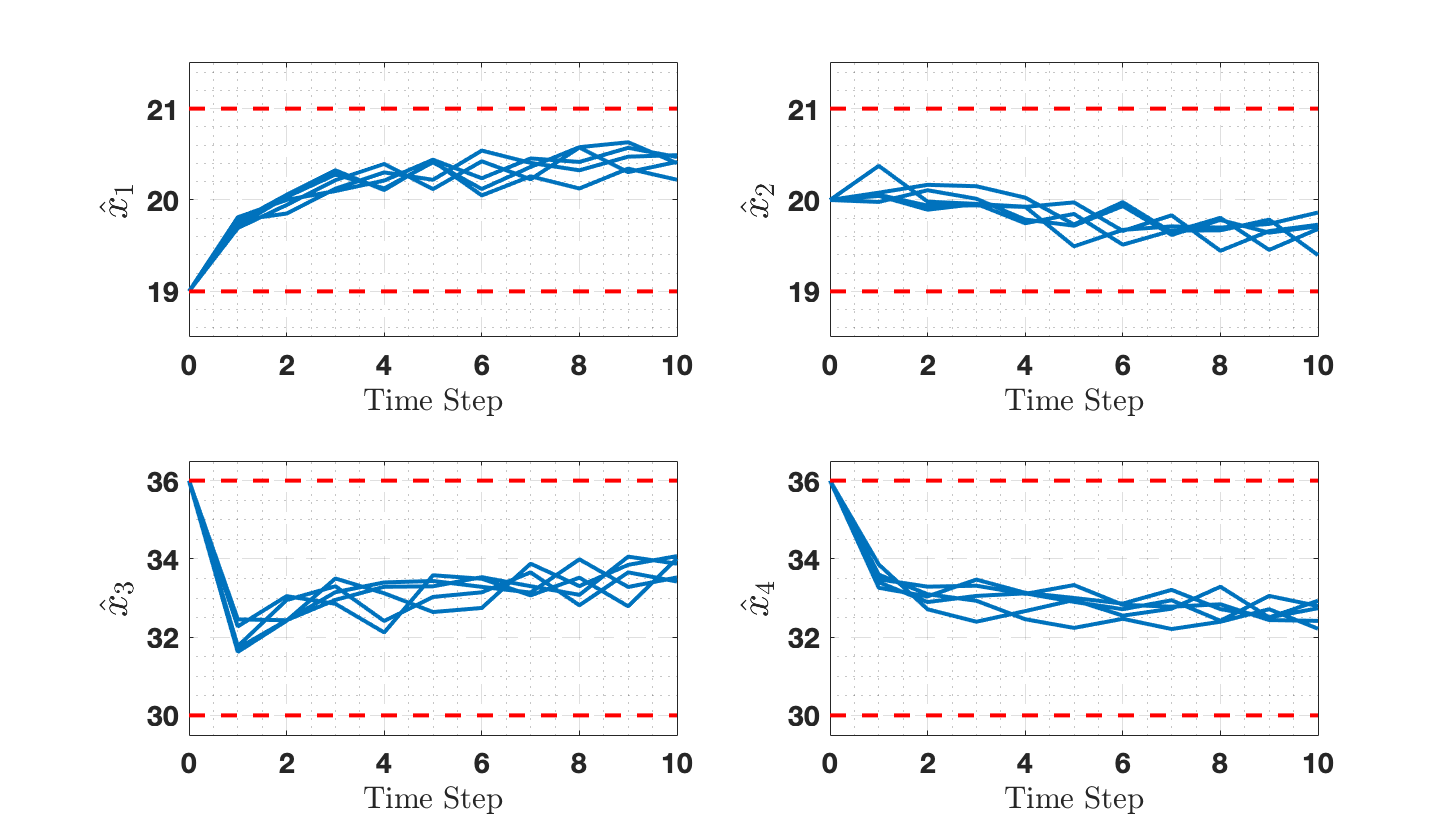
A 4D building automation system controller maintains temperatures in 4 rooms within safe bounds over 10 time steps.
This is a small example suitable for personal computers.
Run:
cd examples/ex_4DBAS-S
make && ./bas4D
5D Room Temperature (ex_5Droom-S)¶
Extension of the 3D room temperature model to 5 dimensions. Requires more computational resources.
Run:
cd examples/ex_5Droom-S
make && ./room5D
7D Building Automation — Verification (ex_7DBAS-S)¶
A 7D building automation system with no control inputs (dim_u = 0).
IMPaCT automatically performs verification (IMC) rather than synthesis,
returning satisfaction probabilities for each state.
Run:
cd examples/ex_7DBAS-S
make && ./bas7D
14D Stochastic System (ex_14Dstochy-S)¶
The highest-dimensional example, demonstrating IMPaCT’s scalability to 14 dimensions. This requires significant computational resources.
Run:
cd examples/ex_14Dstochy-S
make && ./stochy14D